| Basic parameters | |
|---|---|
| Working space | D = 340 mm H = 200 mm |
| Max payload | 500 g |
| Max speed | 0.7 m/s |
| Max acceleration | 8 m/s2 |
| Repetition Accuracy | ±0.1 mm |
| Positioning Accuracy | 0.15 mm |
| DOF | 3/4 |
| Power | 12V - 5A |
| Mass | 4 kg |

| Electronic parameters | ||
|---|---|---|
| Controller | Board | Arduino Mega 2560 Ramps 1.4 |
| Communication | USB TTL (serial) |
|
| On board I/O | Input | 1 analog input (temperature sensor) |
| Output | 3 PWM (Stepper motor/Laser/Vacuum 2 RC Servo (Gripper/4-axis) |
| Mechanical materials | |
|---|---|
| Inner arm | 3D printed |
| Outer arm | Carbon fibre tube |
| Base platform | Aluminum frofiles |
| Moving platform | 3D printed |
| Motor mount | 3D printed Aluminum plate |
| Cover | 3D printed |
Working space


| Basic parameters | |
|---|---|
| Working space | D = 320 mm H = 200 mm |
| Max payload | 700 g |
| Max speed | 0.8 m/s |
| Max acceleration | 20 m/s2 |
| Repetition Accuracy | ±0.15 mm |
| Positioning Accuracy | 0.15 mm |
| DOF | 3/4 |
| Power | 12V - 5A |
| Mass | 4 kg |

| Electronic parameters | ||
|---|---|---|
| Controller | Board | Delta X 2 Board (ARM Cortex-M3) |
| Communication | USB TTL (serial) |
|
| On board I/O | Input | 1 analog input (temperature sensor) |
| Output | 3 PWM (Stepper motor/Laser/Vacuum 2 RC Servo (Gripper/4-axis) |
| Mechanical materials | |
|---|---|
| Inner arm | Aluminum plate |
| Outer arm | Carbon fibre tube |
| Base platform | Aluminum plate |
| Moving platform | Aluminum |
| Motor mount | Aluminum |
| Cover | 3D printed |
Working space


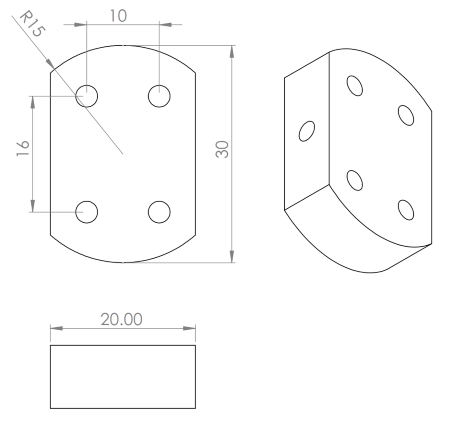
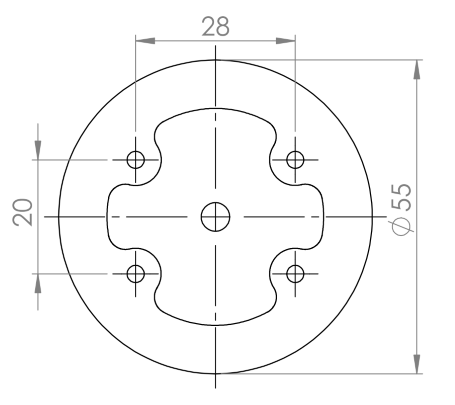
Moving base dimension

| Basic parameters | |
|---|---|
| Working space | D = 400/600/800 mm H = 200 - 300 mm |
| Max payload | 2 kg |
| Max speed | 3 m/s |
| Max acceleration | 50 m/s2 |
| Repetition Accuracy | ±0.15 mm |
| Positioning Accuracy | 0.2 mm |
| DOF | 3/4/5/6 |
| Power | 24VDC - 30A |
| Mass | 25 kg |

| Electronic parameters | ||
|---|---|---|
| Controller | Board | Delta X S Board V1 (ARM Cortex-M7) |
| Communication | USB Ethernet RS232 RS485 TTL (serial) |
|
| On board I/O | Input | V4: 8 digital input, 4 analog input V5: 4 digital input, 2 analog input |
| Output | V4: 8 digital output, 8 relay V5: 8 digital output |
| Mechanical materials | |
|---|---|
| Inner arm | Aluminum plate |
| Outer arm | Carbon fibre tube |
| Base platform | Aluminum |
| Moving platform | Aluminum |
| Motor mount | Aluminum |
| Cover | 3D printed |
Delta X S D800 Working space


3-axis moving base dimension
4-axis moving base dimension

5-axis moving base dimension
6-axis moving base dimension